
Mul on olemas hea vabandus, miks vahepeal usi postitusi ei olnud. Lihtsalt käesoleva ettevalmistamine kestis nii kaua.
See oli pikk ülesanne. Meil oli laev, hunnik sonareid, GPS-e, kõikumisandurid ja lõpmatu hulk kaableid.
 Siin on umbes 1/3 kogu kraamist
Siin on umbes 1/3 kogu kraamist
Me pidime:
- Kokku panema ja käivitama kaks sonari komplekti (andur, kõikumisandur, GPS ja kõik, mis neid ühendab) töökojas laua peal.
- Kui eelmises punktis kõik toimis, siis paigaldama kõik see laeva peale. Ja loomulikult nii, et laeva peal ka töötaks.
- Ära mõõtma ja välja arvutama kõik offsetid
- Sisestama 3. punktis saadud numbrid tarkvarasse ja minema mõõtma
 Alustasime korraliku plaaniga klassiruumis
Alustasime korraliku plaaniga klassiruumis
Kõik mõõteristad olid kastides riiulite peal. Sellepärast tuli alustada täiesti nullist.
 Kinnituse lahtikeeramine selleks et puhastada
Kinnituse lahtikeeramine selleks et puhastada
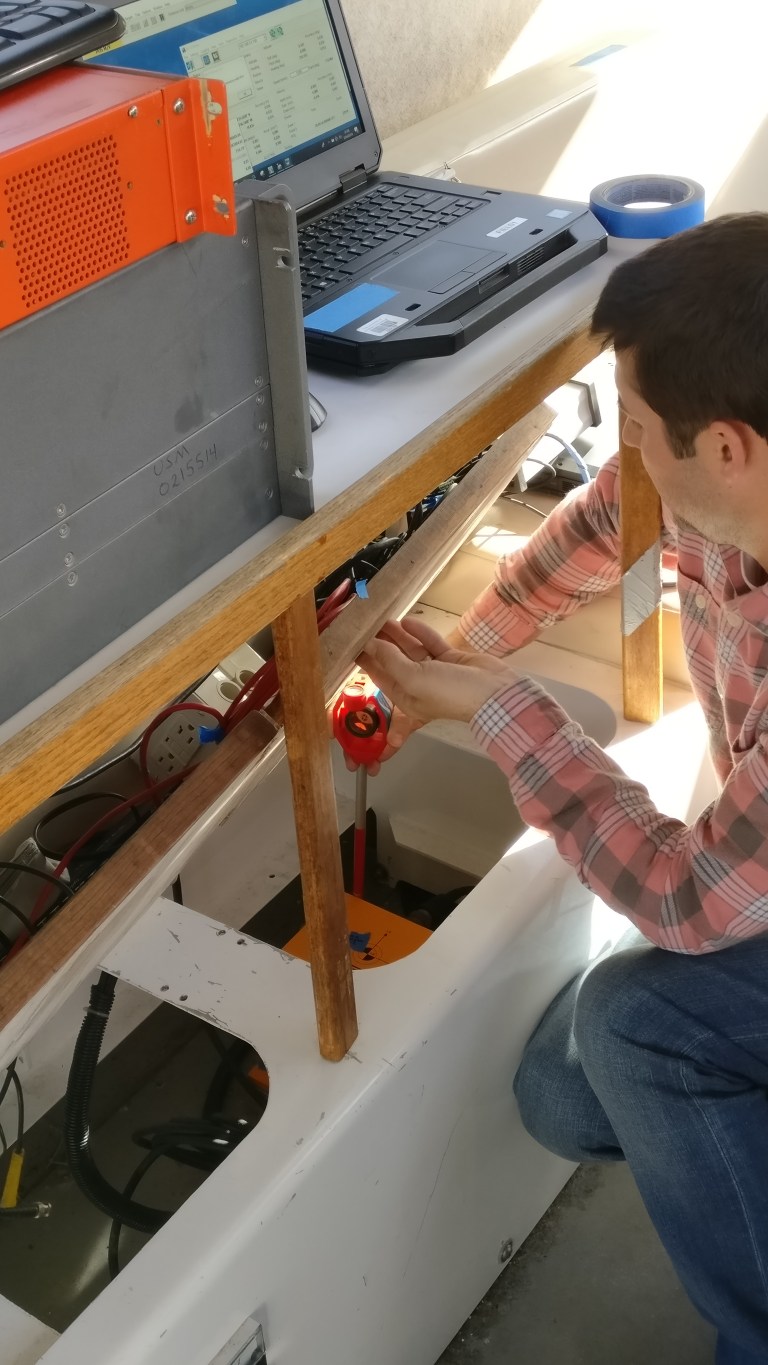
 Samal ajal kui ühed mutreid keerasid, teised asusid arvutite kallale
Samal ajal kui ühed mutreid keerasid, teised asusid arvutite kallale
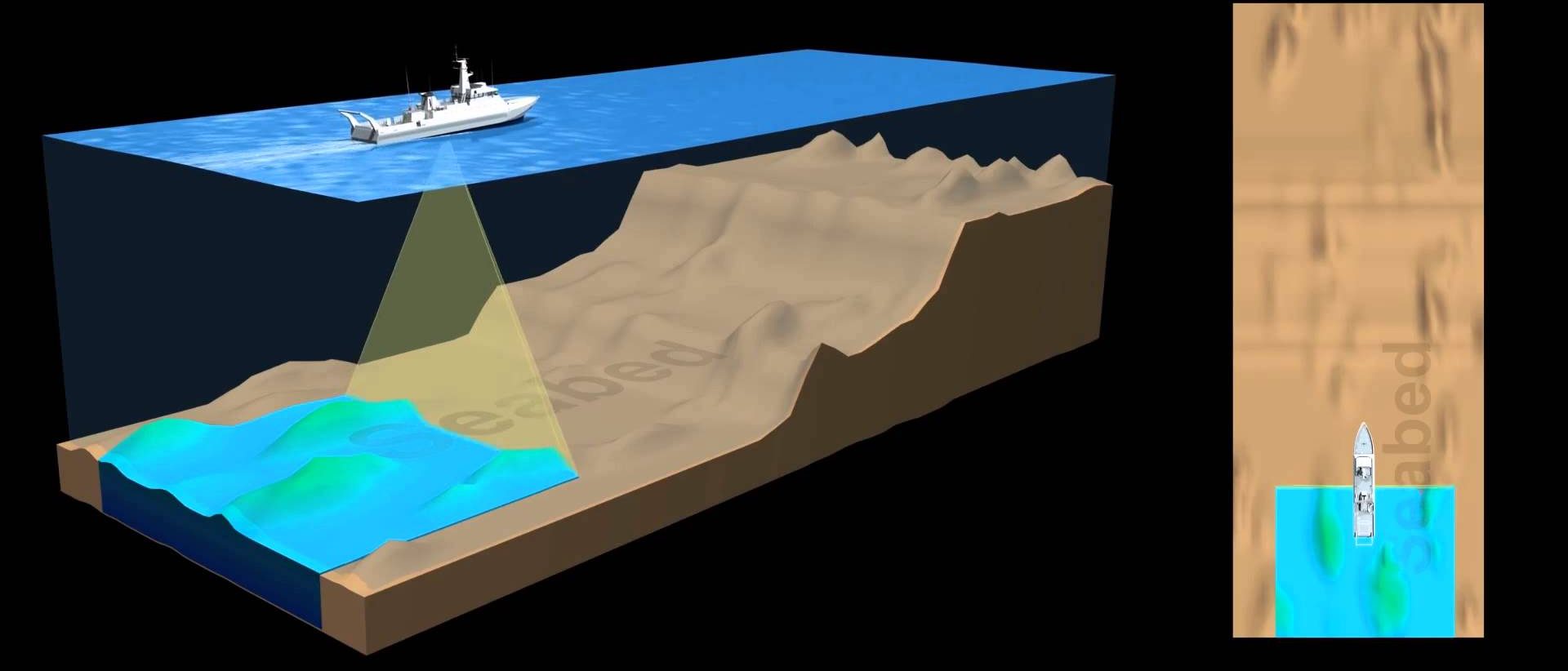
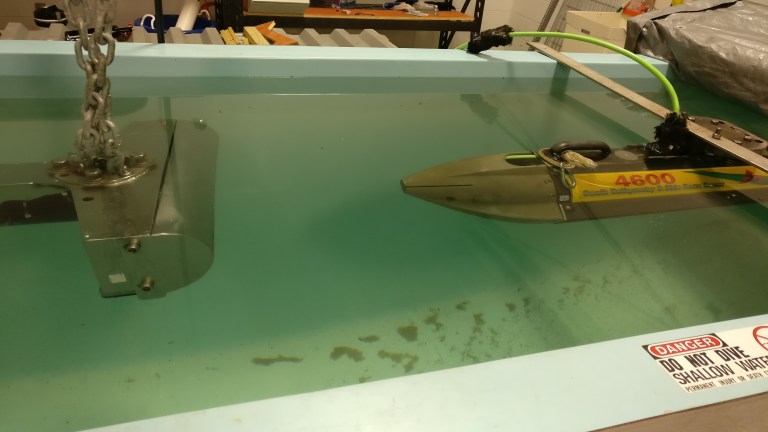 Nagu kõik loomulikult teavad, kaasaegset sonarit ei tohi käividada õhus. Kui veekogu pole käepärast, võib kasutada suure vanni
Nagu kõik loomulikult teavad, kaasaegset sonarit ei tohi käividada õhus. Kui veekogu pole käepärast, võib kasutada suure vanni
 GPS antennid pidime viima õue
GPS antennid pidime viima õue
 Nii näeb välja üks töötav süsteem. Jah, ma tean et juhtmed võiksid korralikum olla
Nii näeb välja üks töötav süsteem. Jah, ma tean et juhtmed võiksid korralikum olla
Siin esimene samm lõppeb ja algab teine. Arvutikastid viiakse laeva, sinna lähevad ka GPS vastuvõtjad ja kõikumisandur. Et elu keerilisemaks teha, meil on kaks sonarit, aga üks IMU (Internal Motion Unit). Tema andmeid tuleb jagada mõlemale arvutile.
 Andur läheb kõigepealt jala külge
Andur läheb kõigepealt jala külge
 Ja siis jalg paadi külge
Ja siis jalg paadi külge
 Jala kinnitus lähemalt. Võimaldab keerata jalg ülesõitudeks “puhkeasendisse”
Jala kinnitus lähemalt. Võimaldab keerata jalg ülesõitudeks “puhkeasendisse”
 Juhtmed viiakase korralikult läbi, et kuskil ei segaks
Juhtmed viiakase korralikult läbi, et kuskil ei segaks
Kui kõik seadmed olid oma kohtadele kinnitatud ja ühendatud, tegime proovisõitu GPS-i testimiseks.
Paadisõit kuival maal
Samm 2 valmis, tegime paisi ja jatkasime järgmisel päeval.
3. samm oli kõige pikem. Tulles kohale 8:30ks ja alustades mõõtmisi kell 9, saime valmis peale 15. Peamine, et enne pimedust.
 Siin pildile on joonistatud kõik mõõteseadmed, koordinaatide alguspunkt, referentspunktid ja tahhümeetri asukohad laeva ümber
Siin pildile on joonistatud kõik mõõteseadmed, koordinaatide alguspunkt, referentspunktid ja tahhümeetri asukohad laeva ümber
 Jeremy põlvitab prismaga alguspunkti kohal
Jeremy põlvitab prismaga alguspunkti kohal
Kõigepealt lõime laeva ümber kohaliku koordinaatsüsteemi. Selleks kinnitasime seinadele/postidele reeperid. See koordinaatsüsteem on vajalik selleks, et jätkata tööd järgmisel päeval või kui mõni kolmjalg liigub paigast ära, siis saab seda süsteemi tagasi siduda.
 Käru laevaga on tõstetud tungraudade peale, et seisaks kindlalt paigal
Käru laevaga on tõstetud tungraudade peale, et seisaks kindlalt paigal
Mõõtmine kulges väga rutiinselt ja punkte oli palju: mõlemas pardas üle kümme, kaks ahtris, siis antennid katusel, 4 pinkti iga jala küljes ja kümnekond igal sonaril. x2 sest kaks võtet ju!
 Iga sinine kleeps tähendab ühe punkti mida mõõta
Iga sinine kleeps tähendab ühe punkti mida mõõta
 Alguses mõtlesime, et sonaril piisab kahest punktis, aga pidime neid juurde tekitama
Alguses mõtlesime, et sonaril piisab kahest punktis, aga pidime neid juurde tekitama
 Siin hetkel mõõdetakse prismat laeva tekil, paremal on näha üks tahhümeetri asukohtadest
Siin hetkel mõõdetakse prismat laeva tekil, paremal on näha üks tahhümeetri asukohtadest
 Sellest tekil olevast kolmjalalt me hiljem mõõtsime punktid laeva sees.
Sellest tekil olevast kolmjalalt me hiljem mõõtsime punktid laeva sees.
 Kõige keerulisem koht – kõikumisandur laeva sees. Kasutatakse väikest prismat, üritades hoida seda võimalikult vertikaalselt
Kõige keerulisem koht – kõikumisandur laeva sees. Kasutatakse väikest prismat, üritades hoida seda võimalikult vertikaalselt
Samm 3,5 valmis, jätkasime arvuti taga. Tahhümeetrilt eksportisime punktifail ja SC4W tarkvara arvutas meile punktide koordinaadid meetrites, kuus märki peale koma. Siin oli kekv see, et litsent on ainult üks ja valdav enamus ei saanud ise programmi kasutada, vaid pidid lepima valmisnumbritega. Pole hullu, saan seda teha kui valmistame paati suveprojektiks.
Aga kolmas punkt valmis, läksime koos paadiga välja.
 Nii sõitsime umbes 70km. Hästi on näha sonarijalg transpordiasendis
Nii sõitsime umbes 70km. Hästi on näha sonarijalg transpordiasendis
Tol päeval oli väga udune ja imelik kuidas me üldse välja läksime. Sellepärast see osa suurt huvi endast ei kujuta. Niipalju andmeid saime küll, et kinnitada offsettide õigsust.


One thought on “Mõõdistuslaeva koordinaatsüsteemi määramine”