
Jäänud on veel viimased ettevalmistused ja saab alustada mõõdistamist.
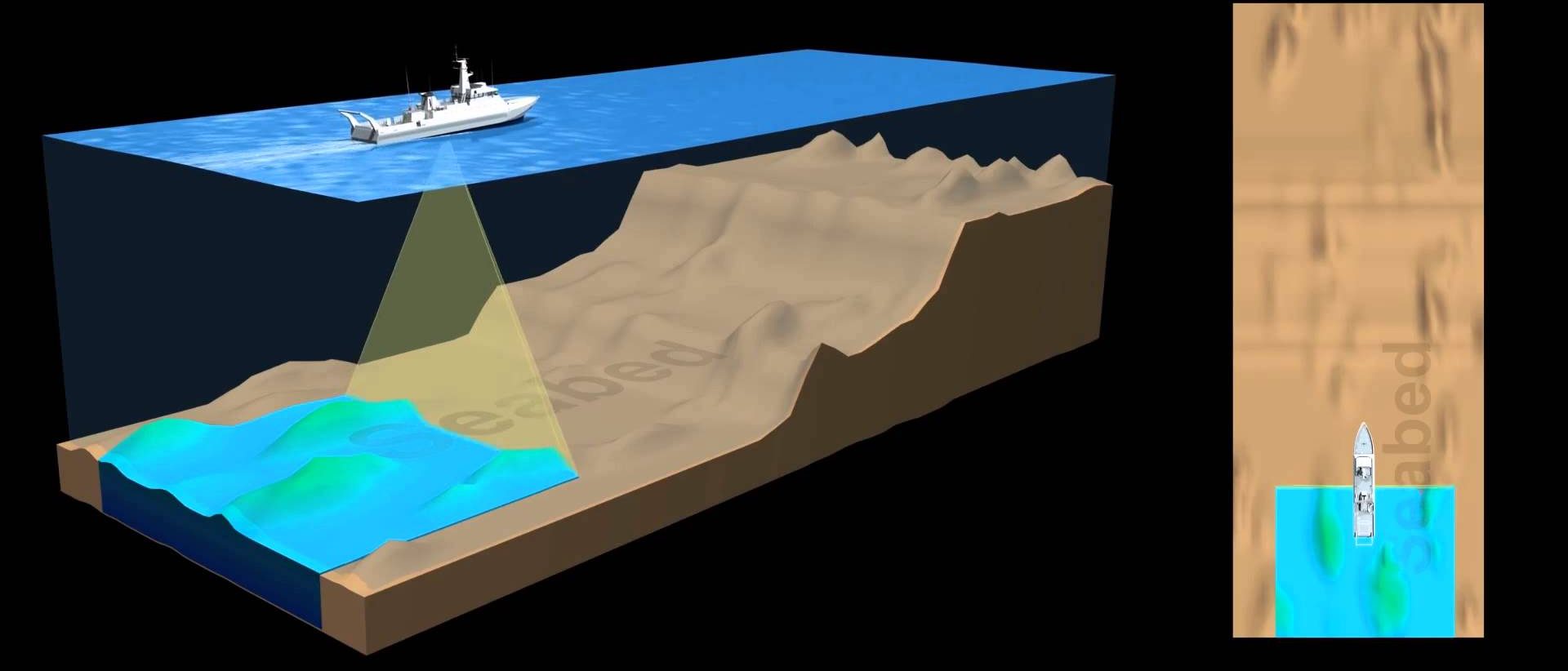
Millised seadmed meil siis kaasas on: ühekiireline kajalood, paljukiireline sonar mis samal ajal ka külgvaatesonar (interferonomery + sidescan), kõikumise mõõtja, GPS, Applanix POS MV kõikumise, koordinaatide ja kursii kokku viimiseks, helikiiruse profileerija, NTRIP wifi kaudu, setteproovija, generaatorid.
Enamuse nendest paigutamine laeva peal nõuab offsettide mõõtmist. Kuidas seda teha tahhümeetriga ma kirjeldasin Mõõdistuslaeva koordinaatsüsteemi määramine postituses. Nüüd läksime lihtasmat teed ja kutsusime kohale Abigail – eelmise aasta vilistlane, kes nüüd töötab NOAA-s ja majandab seal kaasaskantava LIDAR-it. Ta oli nõus meid aitama ja mõnetunnise töö tulemusena saime seadmete koordinaadid laeva suhtelises süsteemis. Nubrid tulid välja väga kahtlased, tundub et peale mõõdistust peame siiski kõik üle mõõtma tahhümeetriga.
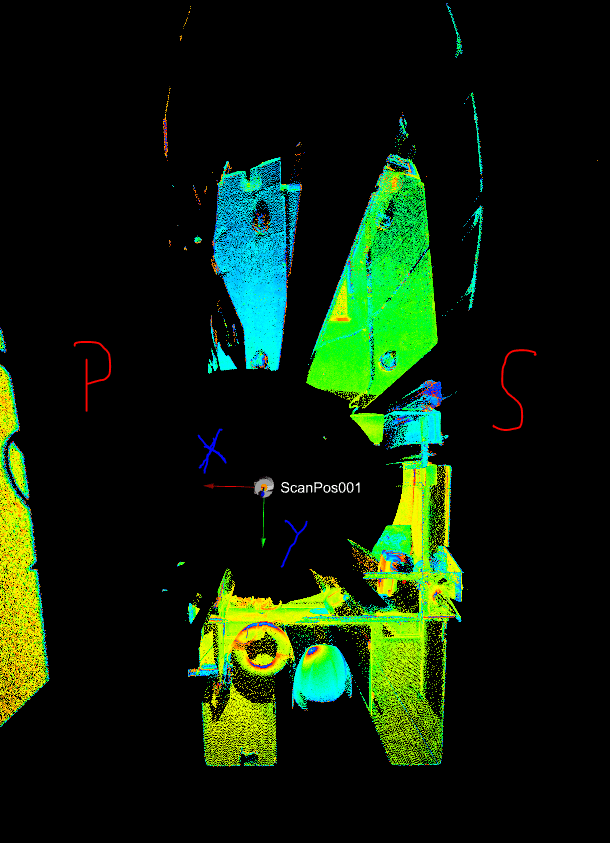
Siin pildid on skaneeritud laeva sisu. Vöör on üleval, vasak ja parem parras on tähistatud tähtedega P(ort) ja S(tarboard)
Edasi on video, mis on tehtud skaneerimise käigus. Laevast vasakul seisab LIDAR (musta kolmjala peal) ja peenikestel kolmjalgadel helkurid – koordinaatpunktid. Kui tekkib soov endale selline hankida, siis tootja nimi on RIEGL, mudel VZ-1000.
Teine oluline osa ettevalmistusest on veetaseme jälgimne. Selleks paigaldame samu rõhuandureid nagu Kevadsemestri ained: loodete teooria postituses. Ainult seekord kohad valime ise, kõrgspunktid otsime/rajame ise ja üleüldse kõik teeme ise. Õppejuõdude käest nõu küsimine on lubatud.
Siin huvitav lugu. Kahe tiimi peale on vaja kolm seadet. Rõhuandureid on ainult kaks ja asi läks sinna, et peame kasutama ühe radar-tüüpi andurit. Minu arvates ühes projektis kahe erineva seadme kasutamine ei ole mõistlik, aga mulle lubati et kõik saab olla ok. Ja viimasel hetkel tuli välja kolmas rõhuandur, mis varem oli kasutusel mingis muus asjas ja siis tuli tagasi ja sellest kõik unustasid. Asi lahenes hästi, aga nüüd vähemalt selge et korralagedus on igalpool.

Kohustuslik andurite kalibreerimine enne töö algust

Rõõmus nägu on sellepärast, et ruumis töötab konditsiooner
Kunagi mais käisime veetasemepostidele kohti valimas.

See on Gulf Coast Research Laboratory

Ja see on Tiki baar

Loodete amplituud selles piirkonnas on peaagu 1m, aga see on maksimum, pigem on pool meetrit

Baaris seadet paigaldades kõige suurem mure oli, et seda keegi näpima ei tuleks
Kahju et Tiki baar avatakse alles kell 16, sest oleks tore veetaset jälgita ja karastusjooke rüübata. Seaded jäävad kuuks ajaks andmeid koguma, alguses ja lõpus tuleb teha kolmetunnised manuaalsed vaatlused ja iga nädal lisaks kaks tundi ka.
NOAA standartide järgi iga veetaseme vaatlspost peab olema seotud 5 kõrguspunktiga. Meie piirkondades olemasolevad punktid jäid liiga kaugele, sellepärast pidime neid ise tekitama.

GCRL kandis leidsime ühe vana kõrgusvõrku punkti ja kasutasime seda

Kolmjälga paigaldamine punkti peale, hiljem GPS jääb 4 tunni jooksul kõrgusandmeid koguma

Niikaua rajame ajutised kõrguspinktid

Igast punktis tehakse kirjeldus
Nüüd võib alustada nivelleerimist

Siis saime esimest korda päikse käes põletada
Pärast seda muutsime targemaks ja Tiki baaris läksime nivelleerime kell 7 hommikul. Aga ikka jäi see tunne, kui seisad, hoiad latti ja tunned kuidas päike sind kõrvetab. Kohalikud ütlevad, et kui hakkab astronoomilne suvi, siis läheb hullmemaks. Hetkel päeval üle 30, öösel vähemalt 25.
Nüüd on valmis mõõdistamist alustama. Et mitte iga päev sõita tund aega edasi-tagasi, saime hotelli tudengide erihinnaga ($90 kaheinimese toa eest) ja IHO raha eest.

Meie piirkonna esmatähtis osa. Sugavused kuni 3m
Tundib, et teine tiim teeb tööd lõdvemalt. Neil on 5 inimest ja koht on ka lähemal. Mõõteseadmeid nad laua peal kokku ei pannud, alustasid otse laeval. Mingit testimist kohapeal ei taha teha, viivad paati kohale ja siis alles proovivad järele. Veetasemepost ka ainult üks ja asub ühe liikme majast päris lähedal.
Ärge unistage reedel tähistada rahvusvahelist hüdrograafiapäeva!

Jõudu!
Mis asi on kollane torpeedo pildi “Rõõmus nägu on sellepärast, et ruumis töötab konditsiooner” kohal?
Head tulevat hüdrograafide päeva sullegi!
Pets
LikeLike
Konkreetselt see on Eagle Ray AUV. See on ISE Explorer Class AUV. Sarnased on kasutusel MH370 otsingutel.
LikeLike
Seda ma arvasin. Kas saate neid “ujutada” ka?
LikeLike
Ei, pole õppekava sees. Aga kui on huvi, võid läbida eraldi kuuenädalane kursus https://www.usm.edu/ocean-science-engineering/unmanned-maritime-systems-ums-certification.php
LikeLike