
Peale kõiki ettevalmistumisi saab ka mõõtma hakata. Aga sellega kõik ei lõpe, kunagi tuleb ka aruandeid kirjutada.
Kõigepealt tiimist. Meie oma on tõesti rahvusvaheline – 4 inimest eri riikidest, kusjuures ainult ühe ameeriklase olemasolu põhjustab mõningaid probleeme nt. ainult tema saab nädalavahetusel Stennis-e sisse. Kõik mehed, kaks mereväeohvitseri (Jeremy ja Adi), ainult Emmanuel õpib kaheaastasel programmil. Võrdluseks, teises tiimis on viis liiget: 4 ameeriklast, üks Tonga kodanik, kaks naist.

Vasakult paremale: USA, Malaisia, Nigeeria, Eesti
Kuna meil on ainult üks võimas auto paati vedamiseks, alustasime juba pühapäeval ja jäime reedeni. Esmaspäevaks jäid viimane kalibreerimine ja paadi tagasitoomine.
Üritasime oma tööd lõpetada võimalikult kiiresti ühe nädala jooksul, sest järgmisel nädalal lubati palju äikesevihma. Alustasime mõõdistamisega sest LIDAR oli teiese tiimi käes. Kolme päevaga saime peaaegu kõik ära mõõdistatud ja saime LIDAR-i oma kätte. Peaaegu sellepärast et ühes jões jäime kohe kinni. Kinni jäime ka veel mitu korda. Teine tiimi üks paadimootoritest läks üldse katki ja nad olid kaks päeva remondis.

Paat ootab töö algust

Kohalikutele krabidele meeldis paat väga, kogu aeg roomasid peal

Vaade töökohale. Töö ajal tuli seista
Iga hommik pool kuni tund aega läks seadmete käivitamisele. Lihtsalt arusaamatutel põhjustel arvutid ei pinginud üksteist või Edgetech ei läinud käima või midagi veel. Siis peale mitmekordset programmide sulgemist ja avamist kõik töötas jälle. Ükskord ma läksin ühekiirelise kajaloodi linti kohendama ja riivasin kaks kaabli liidest, mis kohe kaotasid kontakti ja kadus GPS ühendus.
Alguses planeerisime teha tööd paarides, nii et kaks paadis ja kaks puhkavad/teevad esmast andmetöötlust. Siis tundus loogilene skeem “kolm meest paadis ja üks kalda peal”. Tänu tehnika tõrgetele lõpetasime kõik ühes paadis kogu aja jooksul. Oli veidi kitsas.

Aeg ajalt me vahetasime kohti
Tööpaev algas äratusega kell 6 ja 7ks üritasime olla sadamas (umbes 15 min sõitu). Esimesed kolm päeva mõõdistasime kuskil 18ni, siis peamine osa sai valmis ja hakkasime lõpetama varem.
Elasime Gulf Hill hotellis, mis oli ehitatud 1927.a. kaastates maffia rahastuse. Aastad annavad ennast tunda – välimus on natuke kulunud ja tubades suured kineskoop telekad. Continental breakfast täitsa näljakas – magusad hommikukrõbinad, banaanid, mandarinid, või, moos, mesi, kreemjuust ja igasugused saiakesed kuhu seda määrida.

Vaade hotellist golfiväljakutele
Paadis sõime leiba maapähklivõiga, virsikuid, komme.

Juhuslik idee võtta kaasa jääkast osutus kõige paremaks ideeks terve mõõdistuse jooksul
Paadi konditsineerist suurt asja ei saanud, tarbib liiga palju voolu ja generaator ülekuumeneb. Ei riskinud generaatori kaotamisega ja sõitsime lahtiste akendega. Väike meretuul ja kaks ventilaatorit tegid asja talutavaks, kaasavõetud termomeeter näitas 27-32 C vahel sõltuvalt pilvede hulgast.
Täis paagiga generaator kestis peaaegu tundi, siis suri välja ja UPS-i piiksumise saatel oli vaja seda kas kiiresti tankida või käivitada teine. Üks generaatoritest oli VÄGA kapriisne, kord käivitus esimesest tõmmest, teine kord kõik kordamööda tulutult üritasid teda käivitada 10 min jooksul.

Kütusekanistrid olid ka naljanumber. Mõlemal mingid patenteeritud spill-proof otsikud, aga 4 inimest ei suutnud välja nuputada kuidas nendes valada. Lõpuks keerasime neid maha ja kasutasime lehtrit
Probleem oli ka sonari kalibreerimisega. Kuna ümberringi on madal ja tasane põhi, käisime mitme miili kaugusel süvendatud kanalis kalibreerimas.

LIDAR-it kalibreerisime Biloxi silla all
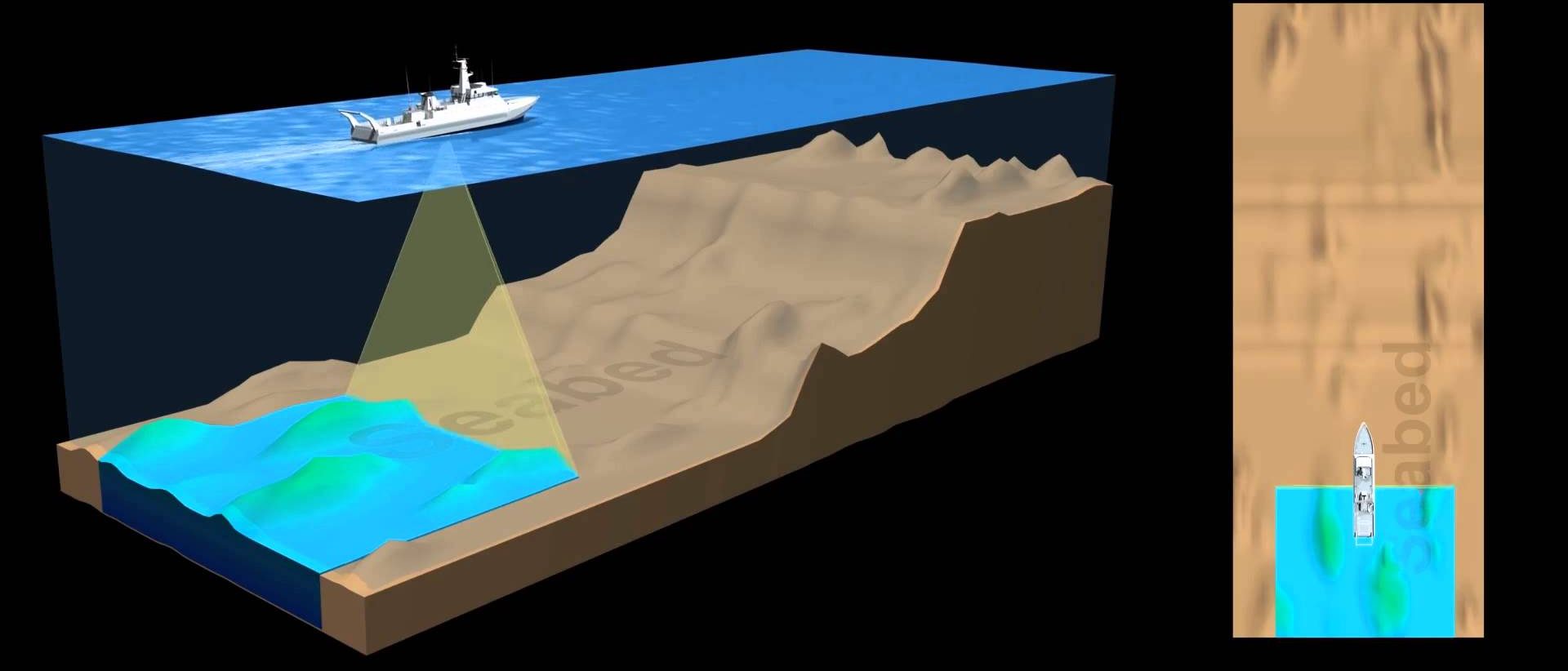
Enamus sügavustest jäi 1-2 m vahemikku, 4 m ei näinud kordagi. Mõõtsime aeglaselt, 4-5 sõlme. Ühekiireline kajalood segas oma signaaliga Edgetech-i tööd, sellepärast teda ei kasutanud. Sonariga kogusime andmeid nii, et batümeetria oleks 120% ülekattega, külgvaate sonar 200%. Kõik see ja maksimaalne pingimise sagedus andis PALJU andmeid. Esimesel päeval kogusime 66 GB andmeid, teisel 116, kolmandal 71, neljanadal 0,98 (täitsime auke), LIDAR kokku 36 GB (tegime mitu korda kõik kaldad ära).

Merepoolses osas oli mitu hüljatud ja lagunevat kaid. Et seda LIDAR-iga mõõta, pidi minema päris lähedale

Eemal ehitatakse uut kaid. Need töömehed olid väga tundlikud lainetuse suhtes ja kogu aeg karjusid meile kui me (väga lähedalt) mööda sõitsime, et me kiirust vähendasime
Merepoolne osa tehtud, läksime jõgedesse. Ja kohe jäime kinni. Õnneks põhi on pehme muda ja sonar viga ei saanud. Küll aga kõik kohad said tal muda täis ja helikiiruse andur ei mõõtnud. Ilma selleta Edgetech keeldus töötamast.

Seal me kinni jäime

Muda täis Edgetech. Alguses lootsime teda loputada, sõites suuremal kiirusel, aga see ei aidanud
Kõik olid suht ärevil, mis siis saab, kui sonarit tööle ei saa. Tagavara pole! Läksime sadamasse kus on voolik.

Veesurvega loputades saime asja korda. Kõik see muda vees on pärit sonari seest

Lisaks sõukruvi ümber oli jupp nööri
See ei olnud ainuke kord, kokku kinnisõitmisi oli 3 või 4. Üks kord nii hullusti, et mootori jahutus läks umbe ja mootor hakkas suitsu välja ajama. Umbes nagu aurikuga sõidaks.

Paat töö käigus. Pilti tegin kailt samal ajal kui vaatlesin veetaset
Jah, veetaseme vaatlused jätkuvad, nädalas tuleb teha kas 2 tundi järjest või 1 tund ühel ja 1 tund teisel päeval.

Üks veetaseme vaatluspostides asub baari kõrval ja vaatluste ajal saab ennast jahutada karastusjookidega. Antud juhul root beer. Pange tähele veetemperatuuri
Mõõtsime kõik nurgatagused ära, läksime nii kaugele, et merekaardi järgi vesi lõppes.
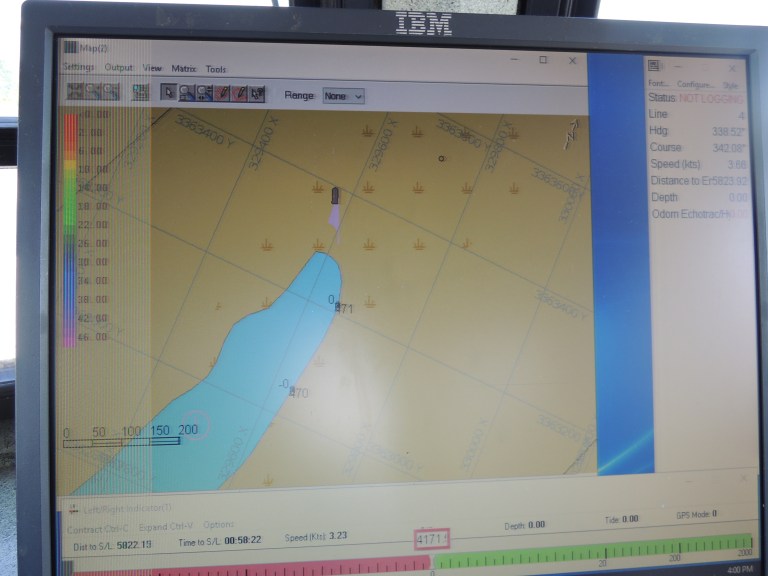
Siis panime taustaks satelliitpildi
Vaaded mööda jõge ülesvoolu sõites. Paadil imelik nimi

Elamukompleks, kus igal elanikul lisaks parkimiskohale kaikoht. Mõõtsime siin kõik LIDAR-iga
Võtsime setteproove ka. Sarnane muda, aga mida rohkem ülesvoolu, seda suuremad puutükid sees.

Mul selline nägu sest kaua võib seda muda kaevata
Neljandal päeval meile tuli appi Fleet Survey Team ja tõi z-boat-i.

Z-boat-i nad juhtisid oma paadi pealt

Z-boat tegi meie jaoks sadama ala ära. Tal on paljukiireline sonar, korjas umbes 2 GB andmeid
See tehnika ei ole salajane, aga FST prioriteet on omad mehed, sellepärast seal töötas Jeremy.
Nüüd on tagasi jahedas klassiruumis. Ülikool ostis uued arvutid andmetöötluseks, 64GB RAM. Ah jaa, laeva offsetid tuleb uuesti tahhümeetri abil mõõta. See LIDAR skaneerimine ja tulemuste töötlemine MATLAB-is ei anna loogilist vastust.